![]()
![]()
A modern, modular C++ and ROS 2 framework for Localization and SLAM. Configurable pipelines for LiDAR Odometry, LIO, and more.
Why MOLA | Solutions | Plans & Pricing | Documentation
| Distro | Build dev | Release |
|---|---|---|
| ROS 2 Humble (u22.04) |  |
|
| ROS 2 Jazzy (u24.04) |  |
|
| ROS 2 Kilted (u24.04) |  |
|
| ROS 2 Rolling (u24.04) |  |
| EOL Distro | Last Release |
|---|---|
| ROS 2 Iron (u22.04) |  |
MOLA (Modular Optimization framework for Localization and mApping) is a modular, extensible, and high-performance framework for robotics localization and 🗺️ mapping.
This repository contains the base open-sourced packages for the MOLA project. Other packages exist under the MOLAorg organization.
Refer to the official documentation for build instructions, demos, API reference, etc.
- 📍 LiDAR Odometry (LO), LiDAR-Inertial Odometry (LIO), geo-referenced maps, sensor fusion
- 🧩 Fully configurable YAML pipelines - no recompilation needed to change sensors, filters, or map layers
- 🎯 Flexible accuracy: fast real-time navigation or survey-grade (<1 cm) mapping
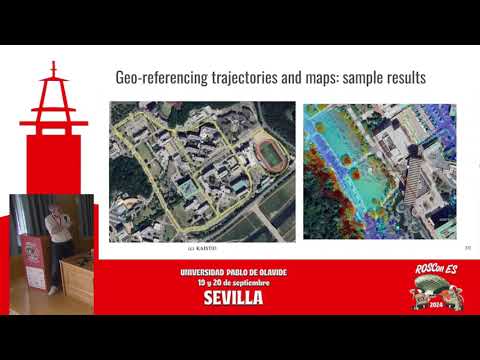
- 🌍 Map-less RTK-quality outdoor georeferencing with low-cost GNSS + LiDAR + IMU
- 🛠️ Rich
.mmmetric map ecosystem: viewer, LAS/PLY/TXT export, filtering, georeferencing tools - 🤖 ROS 2 ready (Humble, Jazzy, Kilted, Rolling) but also usable from standalone pure C++
Lidar-Inertial-Odometry (LIO) demo with Oxford Spires:

Lidar-Odometry (LO) demo with KITTI:

Video (Slides):
Note: Rows within each cell are for amd64 and arm64 architectures.
| Package | ROS 2 Humble BinBuild |
ROS 2 Jazzy BinBuild |
ROS 2 Kilted BinBuild |
ROS 2 Rolling BinBuild |
|---|---|---|---|---|
| kitti_metrics_eval | ||||
| mola | ||||
| mola_bridge_ros2 | ||||
| mola_demos | ||||
| mola_input_euroc_dataset | ||||
| mola_input_kitti360_dataset | ||||
| mola_input_kitti_dataset | ||||
| mola_input_lidar_bin_dataset | ||||
| mola_input_mulran_dataset | ||||
| mola_input_paris_luco_dataset | ||||
| mola_input_rawlog | ||||
| mola_input_rosbag2 | ||||
| mola_input_video | ||||
| mola_kernel | ||||
| mola_launcher | ||||
| mola_metric_maps | ||||
| mola_msgs | ||||
| mola_pose_list | ||||
| mola_relocalization | ||||
| mola_traj_tools | ||||
| mola_viz | ||||
| mola_yaml |
The latest publications on MOLA are (ArXiV).
@article{blanco2025mola_lo,
author = {Jose Luis Blanco-Claraco},
title = {{A flexible framework for accurate LiDAR odometry, map manipulation, and localization}},
journal = {The International Journal of Robotics Research},
volume = {44},
number = {9},
pages = {1553--1599},
year = {2025},
doi = {10.1177/02783649251316881},
URL = { https://doi.org/10.1177/02783649251316881},
eprint = {https://doi.org/10.1177/02783649251316881},
}MOLA was initially presented in 2019 in (PDF):
@INPROCEEDINGS{Blanco-Claraco-RSS-19,
AUTHOR = {Jose Luis Blanco-Claraco},
TITLE = {{A Modular Optimization Framework for Localization and Mapping}},
BOOKTITLE = {Proceedings of Robotics: Science and Systems},
YEAR = {2019},
ADDRESS = {FreiburgimBreisgau, Germany},
MONTH = {June},
DOI = {10.15607/RSS.2019.XV.043}
} MOLA follows an Open Core model. Core modules are released under the GNU GPL v3 license, while foundational libraries (MRPT, mp2p_icp) are BSD-3.
Commercial use: Companies needing to deploy MOLA in closed-source products can obtain a commercial license (MOLA Pro).
See the Plans & Pricing page for details on Community vs Pro editions.
Contributions require acceptance of the Contributor License Agreement (CLA).